La robotique d’entrepôt passe de meilleurs bras à un meilleur logiciel d’orchestration
La robotique d’entrepôt a longtemps été avant tout une course au matériel. Quelle entreprise avait le meilleur bras, la base mobile la plus rapide, la pince la plus solide ou le stack de perception le plus fiable ? Ces questions comptent encore. Mais dans de nombreux déploiements concrets, le centre de gravité des difficultés se déplace ailleurs. Le vrai problème est de plus en plus la coordination de machines imparfaites, d’opérateurs humains et de systèmes d’entreprise dans un environnement chaotique qui change chaque jour.
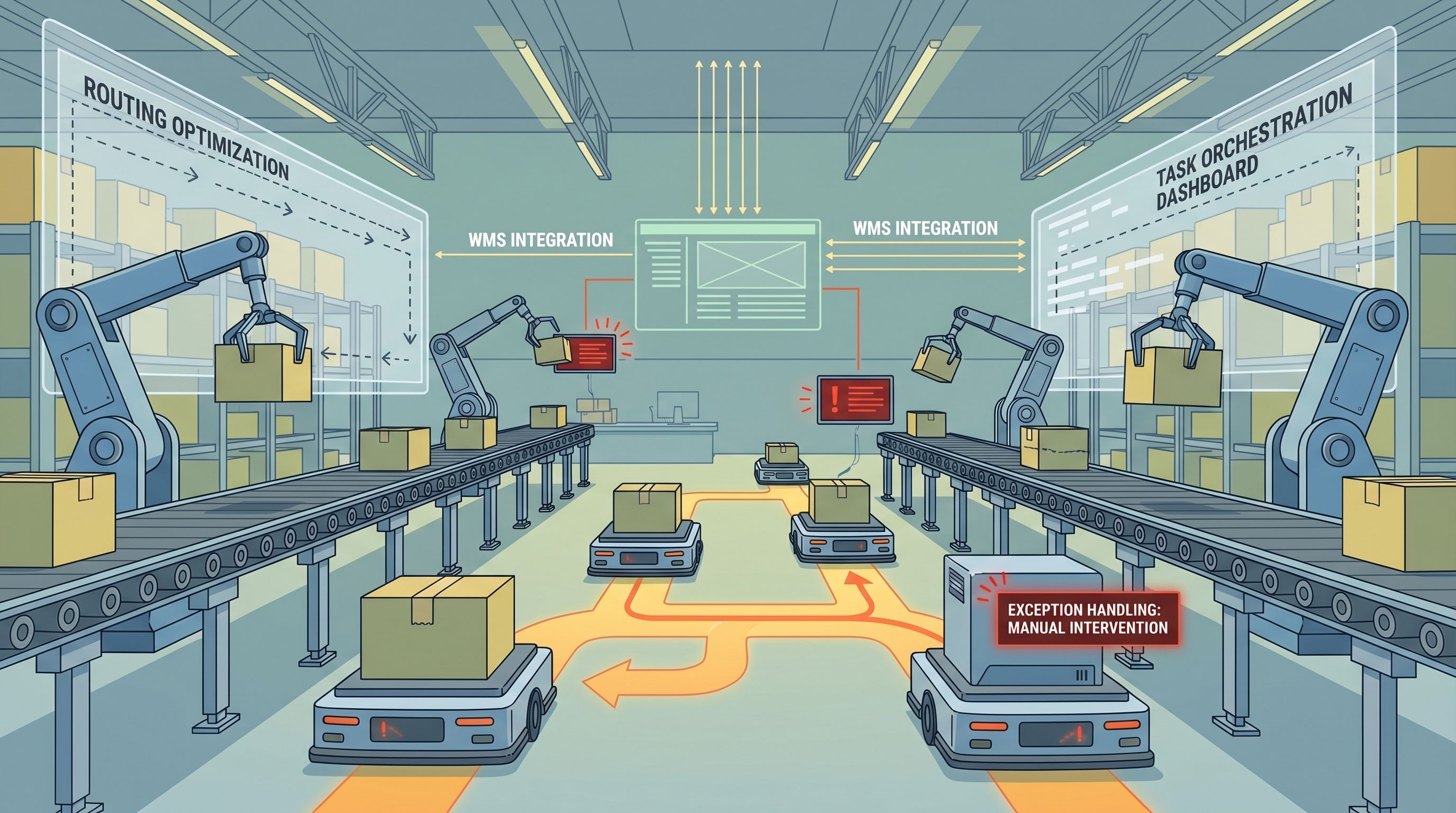
C’est pourquoi les avancées les plus importantes dans l’automatisation des entrepôts sont aujourd’hui souvent des avancées logicielles. La précision du picking ne se résume pas à la préhension. Le débit ne tient pas qu’à la vitesse de pointe. La fiabilité ne se limite pas au temps moyen entre pannes matérielles. Les résultats dépendent de l’orchestration : comment le travail est assigné, quand les tâches sont reroutées, comment les exceptions sont traitées, quelles données circulent dans le WMS, et si l’ensemble du système peut se remettre gracieusement quand la réalité s’écarte du plan.
Le matériel a suffisamment progressé pour révéler le prochain goulot d’étranglement
De nombreuses catégories de robots d’entrepôt ont atteint un niveau de compétence où les prochains gains ne sont plus purement mécaniques. Les robots mobiles autonomes naviguent assez bien dans les installations structurées. Les bras réalisent plus de catégories de picking qu’il y a quelques années. Les systèmes de vision identifient mieux les bacs, les cartons et les variations de SKU. Rien de tout cela ne signifie que le problème matériel est résolu. Les cas limites restent redoutables. Mais cela signifie que, dans un entrepôt en activité, les améliorations incrémentales du matériel génèrent souvent moins de valeur qu’une meilleure coordination sur l’ensemble du workflow.
Un robot qui pick un peu plus vite mais crée des congestions en aval n’améliore pas beaucoup l’opération. Une flotte qui fonctionne bien en isolation mais ne peut rester synchronisée avec les plannings de réapprovisionnement, les équipes et la planification des vagues peut impressionner en démo et décevoir en production. Les entrepôts sont des problèmes système. Une fois que les capacités robotiques de base franchissent un seuil, c’est la couche de planification et d’intégration qui décide si ces capacités se cumulent ou patinent.
L’orchestration est là où réside la complexité opérationnelle
Prenons une opération de fulfillment typique. Les commandes arrivent en rafales. Les emplacements de stock changent. Les opérateurs humains interviennent pour les exceptions. Certains SKU sont faciles à picker, d’autres sont déformables ou fragiles. Les chemins sont bloqués. Les commandes prioritaires passent devant. Une plateforme robotique qui fonctionne parfaitement dans des hypothèses statiques peut se retrouver en difficulté quand ces variables interagissent. Le logiciel d’orchestration est ce qui décide comment le système réagit dans ces moments.
Ce logiciel doit faire plus que distribuer des tâches. Il doit comprendre les dépendances entre tâches, le routage dynamique, l’équilibrage des files d’attente, l’utilisation des postes, et les solutions de repli quand un robot ne peut pas terminer une action. Il doit décider à quel moment escalader un problème vers un humain, quand réessayer automatiquement, et quand rerouter le stock pour préserver les niveaux de service. En d’autres termes, la valeur de la robotique vient de plus en plus du jugement encodé dans le logiciel, et non seulement de la dextérité encodée dans le matériel.
La gestion des exceptions est le vrai test
Les fournisseurs d’automatisation brillent souvent dans les scénarios sans accroc : picks répétitifs, emballages homogènes, inventaire bien étiqueté. Les entrepôts réels sont définis par les exceptions. Un bac arrive endommagé. Un code-barres est illisible. Un conteneur contient des articles mélangés. Un bras rate deux prises de suite. Une tâche de réapprovisionnement est en retard. Un convoyeur fait une remontée. Ce ne sont pas des cas marginaux. Ce sont des conditions quotidiennes.
Les systèmes qui gagnent commercialement ne sont pas toujours ceux qui ont le robot le plus élégant. Ce sont ceux qui absorbent les exceptions sans effondrer le débit. Cela passe généralement par un meilleur logiciel d’orchestration. Le système doit savoir ce qui s’est passé, où cela s’est produit, quelles ressources alternatives existent, et comment maintenir le reste de l’opération en mouvement. Si chaque exception nécessite une surveillance manuelle, le modèle de main-d’œuvre s’effondre. Si les exceptions sont routées intelligemment, même des robots imparfaits peuvent produire de solides résultats économiques.
L’intégration WMS est stratégique, pas administrative
L’un des aspects les plus sous-estimés de l’automatisation des entrepôts est l’intégration avec le système de gestion d’entrepôt (WMS). Pour les non-initiés, la connectivité WMS peut ressembler à de la plomberie back-office. En réalité, elle est stratégique. Le WMS contient la logique de vérité des stocks, la priorité des commandes, l’état des emplacements et le timing des workflows. Si la couche robotique ne peut pas échanger des données propres et en temps réel avec ce système, l’automatisation reste fragile.
L’intégration profonde est difficile parce que les entrepôts partent rarement d’une page blanche. Ils ont des logiciels legacy, des règles métier personnalisées, des variations de processus spécifiques au site, et des années d’habitudes opérationnelles accumulées. Les fournisseurs de robotique doivent donc construire non seulement une machine, mais un produit d’intégration. Leur logiciel doit parler aux API, aux flux d’événements et aux tableaux de bord opérationnels tout en restant résilient face à des données imparfaites. C’est l’une des raisons pour lesquelles des déploiements qui paraissent simples vus de l’extérieur demandent autant d’efforts d’ingénierie réels pour passer à l’échelle.
Des solutions ponctuelles aux systèmes coordonnés
Le marché évolue également des postes robotiques isolés vers la coordination multi-agents. Un robot picker influence le planning de réapprovisionnement. Les chariots autonomes affectent le rythme de l’emballage. Les décisions de tri impactent l’allocation de main-d’œuvre en aval. Alors que de plus en plus de couches d’automatisation entrent dans un même bâtiment, l’optimisation locale devient dangereuse. Un sous-système peut maximiser son efficacité propre au détriment de l’objectif global du site.
C’est là que l’orchestration devient un fossé concurrentiel. Le meilleur logiciel peut raisonner à travers les postes, les flottes, les classes de tâches et les cibles de service. Il peut prioriser le débit global plutôt que des indicateurs de vanité locaux. Il peut exposer les opérateurs aux bonnes surfaces de contrôle sans les noyer sous des alertes de faible valeur. Il peut aussi créer un chemin plus propre vers une automatisation incrémentale, car chaque nouvelle machine se branche sur un tissu de planification plutôt que de devenir un autre silo.
Ce à quoi les acheteurs doivent prêter attention
Pour les opérateurs d’entrepôts qui évaluent les fournisseurs, l’implication pratique est claire : n’évaluez pas la robotique en regardant seulement une démo d’un bras ou d’un véhicule isolé. Demandez comment le système gère les tentatives multiples, les congestions, les pics de file d’attente, les stocks manquants et les passages de relais humains. Demandez à quoi ressemble vraiment l’intégration WMS, quelle part de configuration vit dans le code versus l’interface utilisateur, et comment les politiques au niveau du site sont mises à jour. Demandez si le fournisseur dispose d’outils d’observabilité qui permettent aux opérateurs de diagnostiquer les goulots d’étranglement sans appeler un ingénieur à chaque incident inhabituel.
Ces questions révèlent si l’entreprise vend un robot ou un système d’exploitation pour le flux en entrepôt. Dans la prochaine phase du marché, cette distinction compte davantage. Le matériel continuera de s’améliorer, mais de plus en plus de déploiements se gagneront ou se perdront sur le logiciel qui coordonne les ressources, absorbe le désordre et fait le pont entre les machines et le reste de la stack d’entrepôt.
L’avenir de la robotique d’entrepôt n’est donc pas moins robotique. Il est plus systémique. De meilleurs bras et de meilleures pinces aident encore, surtout dans les environnements de picking difficiles. Mais le vrai différenciateur est de plus en plus la couche d’orchestration qui transforme une collection d’appareils capables en une opération fiable. Dans les entrepôts, le problème le plus difficile n’est souvent pas de faire exécuter une tâche à un robot. C’est de faire en sorte que l’ensemble de l’installation continue de fonctionner quand chaque tâche entre en collision avec toutes les autres.